為機器人選擇適合的編碼器
Date:2020-01-09工業機器人的發展過程中,由以往著重于轎車制作應用開始轉移至工業應用,應用規模跟著速度、安穩性、安全性、精度、操控性和可用性而變得更加廣泛。因而精確定位操控的挑選與運用日益受 到注重之主因。
轎車業是應用機器人最為成熟的工業,占全體市場近40%的份額。機器人的重復精度到達±0.02mm便符合轎車制作業的精度要求,大多數轎車工業機器人會配備密封旋轉絕對式光學編碼器,其他機器人則運用磁性和電感式編碼器或環形解角器。
挑選編碼器保證機器人精度
無論機器人自身的設計多么精良,仍須依賴所運用的元件才干充分發揮其功能與效用。機器人通常由主體、伺服驅動體系、減速器及操控體系所組成。操控器需求接納機器人各銜接處,以便方位隨時反饋,因而編碼器也是保證機器人精度不可或缺的重要元件。
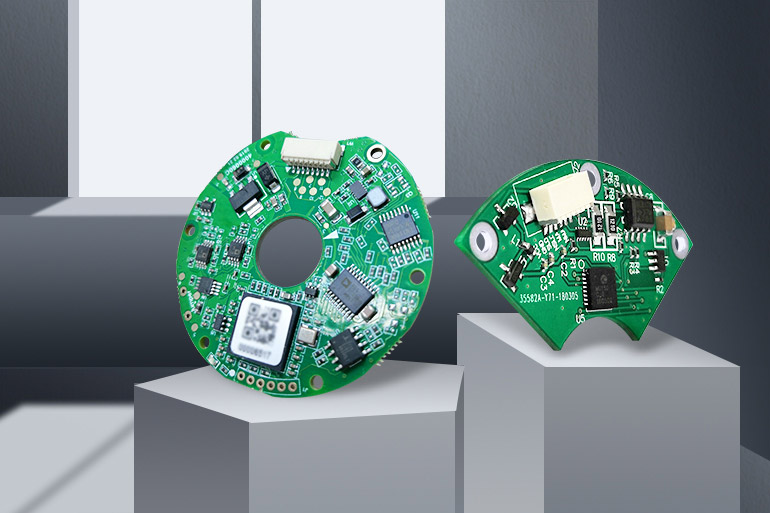
一般而言,規劃機器人時會應用兩種編碼器:光學與磁性編碼器。
磁性編碼器與光學編碼器在方位感知原理上的差異,會由于環境條件不同,而發生不一樣的效能成果。磁性編碼器的規劃採用霍爾效應感測器(Hall-sensor)技術,可在嚴苛的環境條件中輸出牢靠 的數位信號回饋,具廣泛操作溫度、高抗沖擊性與抗震才能、穩定密封及抗污染性等特征,且其非觸摸式的精巧輕盈規劃,則可保證持久安穩的運作。
光學編碼器運用光學來辨識編碼器方位,無論在解析度或精度上都更勝磁性編碼器一籌。為機器人規劃挑選合適的編碼器時,必須根據運用時所注重的效能來判斷:是需求光學編碼器較高的精度, 還是在極點環境條件下表現依然牢靠的磁性編碼器?
上一篇: 協作機器人的5種特殊應用案例